





New DCS: F/A-18C Hornet Academic Videos
Over the past several weeks, we have continued our series of academic videos for our Hornet. We hope these will learn this aircraft prior to release later this year.
Episode 5: ADF and TACAN Navigation
Episode 6: VFR Airfield Landing
To find the latest DCS: F/A-18C Hornet news, please regularly check our mini-updates.
We generally enter a new update at least once a week.
If you have any questions about our Hornet, please see our Frequently Asked Questions (FAQ) post.
DCS: Yak-52 Update

From the desk of Yo-Yo, one of our flight model engineers.
As the Yak-52 is not really suitable for any combat simulation, and is a very special DCS product, we can show the “behind the curtain” tuning and verification process regarding our flight test results.
The first post will be about its roll rate:
This test is a pure aileron roll starting from a climb to perform four full rolls. The rolls start with a maximal, fast full stick deflection, proceeded with full aileron input, and ends with maximal fast stick release (not perfect in both tests - the real test input was a bit delayed and the test seems to be overcompensated).
The atmosphere conditions in DCS were set identical during the tests. This test allows us to check initial roll acceleration (MOIx vs aileron power), steady roll rate (aileron power vs damping), and roll damping (MOIx vs damping). Additionally, we obtained roll rate vs speed, and these two parameters (the first divided by the second) can provide a ratio that is proportional to the so-called spiral coefficient (TAS must be used and the wingspan to get it). It is not necessary to use this spiral coefficient in this case though.
For those who have never seen experimental recordings from the real world, the sinusoidal high frequency noise over the curve is vibration. It was not filtered to better preserve phase and time of the original recording.
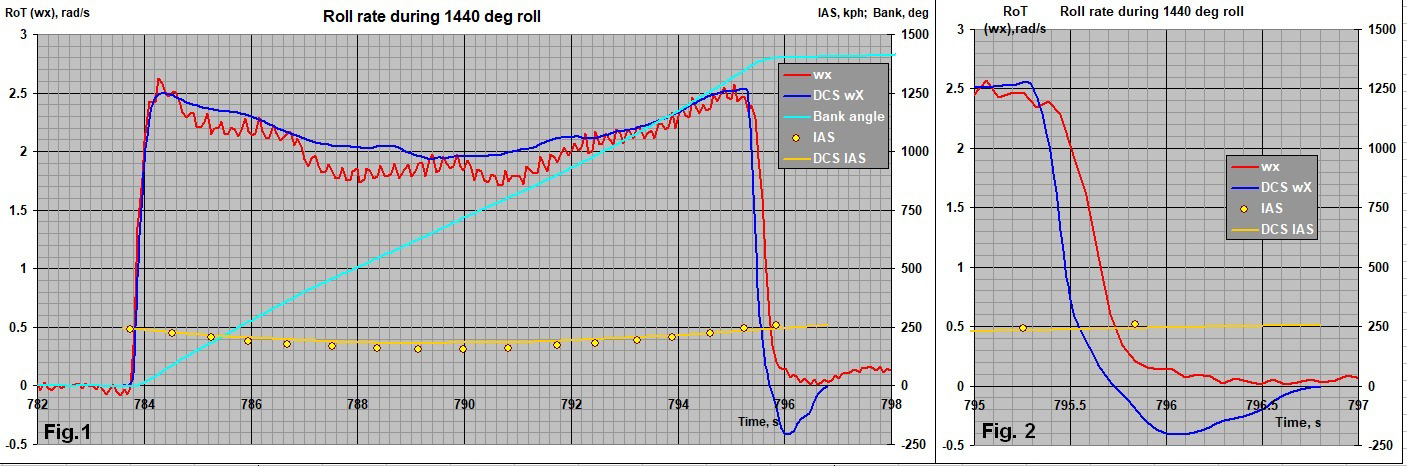
You can clearly see that the model's initial angular acceleration is in good accordance with the test results, see Fig. 4. The deceleration in Fig 2 is in a good accordance to slightly different control input.
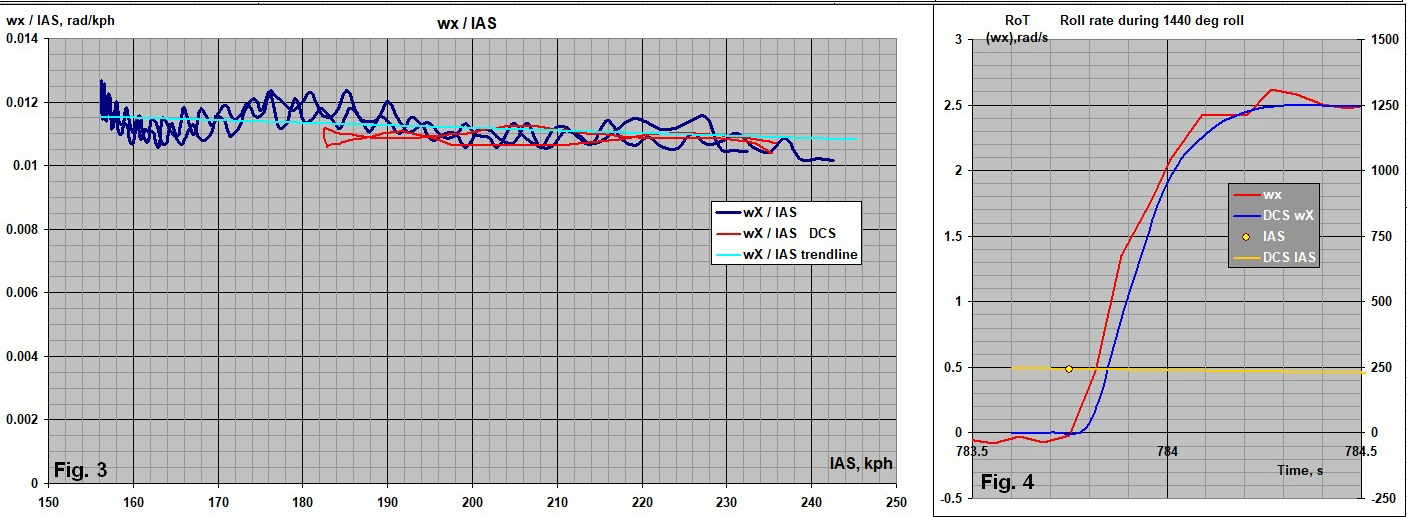
As the initial pitch of both tests were not identical, the speed during the tests is different too. So, to compare the roll rate, we need to divide roll rate to IAS (Fig. 2). It is interesting to note that the real aircraft has very tiny spiral coefficent slope to high IAS (see the trendline). We can suggest that that this is due to aileron linkage elasticity or wing elasticity or both. As it is barely noticeable even a the diagram, we do not think it should be reproduced in the model.
Finally, we'd like to state that the results represent the current stage of model tuning, as such, this is still very much work-in-progress.
P.S. The uneven (sinusoidal) low frequency of the roll rate is a result of the fact that the X-axis of the sensor was not exactly aligned with the plane axis, so it must be disregarded as a parasite effect.
Sincerely,The Eagle Dynamics Team